环境搭建
本文主要介绍如何搭建比赛环境,包括以下内容:
- 安装 ubuntu,
- 安装 ROS
- 安装 tianracer 功能包
- 安装 OBS Studio
环境要求
- Ubuntu 20.04
- ROS Noetic
- Gazebo 11
代码更新
参考 代码更新
使用新版 ROS2GO 随身系统(开箱即用)
比赛环境
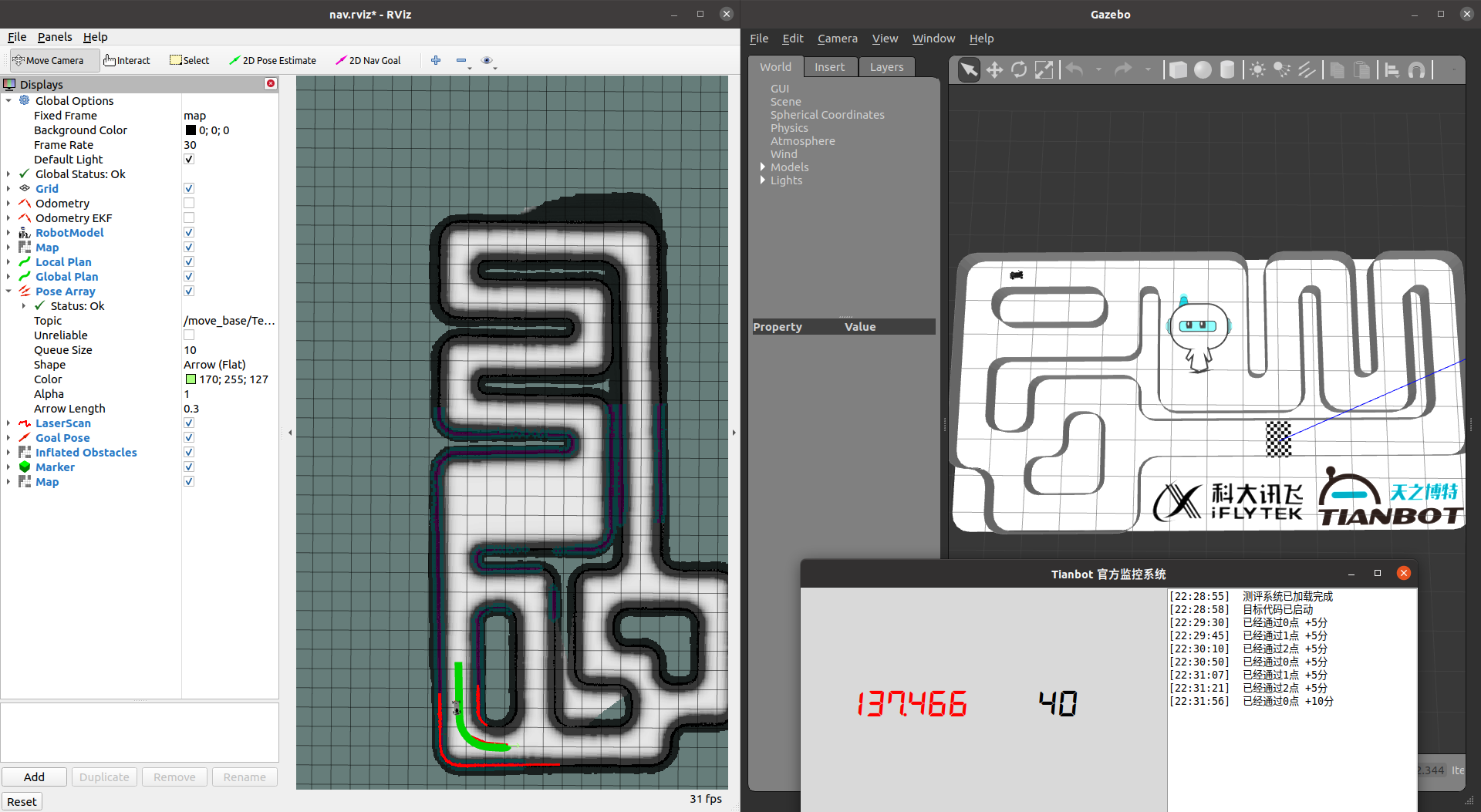
新开启一个终端,运行如下代码,启动 Gazebo 仿真系统,并运行tianracer导航Demo
roslaunch tianracer_gazebo demo_tianracer_teb_nav.launch新开启一个终端,运行如下代码,启动Tianbot评分系统
rosrun tianracer_gazebo judge_system_node.py经过拖拽窗口后可以达到下图所示效果,则环境测试成功
视频录制环境
我们在最新的 ROS2GO 环境已经内置了 OBS Studio,可以直接使用,无需安装。
提示
使用方法
- 打开
OBS Studio,或新开一个终端输入obs即可运行 - 参数配置可参考文章录屏软件推荐:OBS Studio(免费软件)进行软件配置,如
输出位置,输出分辨率,热键等 - 录制步骤,可参考文章电脑上高清录屏,如何用 OBS 轻松搞定?
不使用 ROS2GO(自行安装)
可参考以下几步自行安装
安装 Ubuntu 20.04
安装操作系统这一步,建议大家安装双系统,这样能获得更好的使用体验。
为什么不推荐虚拟机安装
主要有以下原因:
- 性能更好:双系统安装允许您直接使用硬件资源,而不需要通过模拟软件访问。这可以让 Ubuntu 的性能更佳,因为它能直接访问所有硬件。
- 灵活切换:不同于虚拟机需要重启才能更换操作系统,双系统让用户能在两个系统间无缝切换。
- 更好的用户体验:对于学习和娱乐来说,双系统是更好的选择,因为它提供了更接近实体机的用户体验。
- 对电脑的影响较小:双系统只是占用了硬盘的一部分空间,不会过多消耗电脑的资源。
- 锻炼实际操作能力:自己动手安装双系统可以增强对电脑操作的理解和技能。
由于各种安装教程众多,故此处不再赘述,可以参考以下文章自行安装。
TIP
注意:安装过程中,如果出现错误,请先尝试百度解决。
安装 ROS Noetic
可以参考以下文章自行安装。
安装比赛环境
1. 下载仿真系统源码
mkdir -p ~/tianbot_ws/src && cd ~/tianbot_ws/src使用git clone命令下载仿真系统源码。
git clone https://github.com/tianbot/tianracer.git -b dev提示
- 如果提示 bash: git:未找到命令或 not found,请先运行如下命令安装 git
sudo apt-get install git- 如果 git clone 时提示
速度过慢或Time out,可以尝试使用如下命令:
git clone https://mirror.ghproxy.com/https://github.com/tianbot/tianracer.git -b dev2. 编译比赛工作空间
cd ~/tianbot_ws/ && catkin_make3. 安装依赖
设置工作空间环境变量
source ~/tianbot_ws/devel/setup.bash运行安装依赖脚本
roscd tianracer_gazebo/scripts/ && ./env_config.sh4. 配置环境变量
echo "source ~/tianbot_ws/devel/setup.bash" --extend >> ~/.bashrc提示
这一步很重要,否则需要每次开启终端中使用source ~/tianbot_ws/devel/setup.bash命令 来配置环境变量
5. 启动仿真系统测试 Demo
新开启一个终端,运行如下代码,启动 Gazebo 仿真系统,并运行tianracer导航Demo
roslaunch tianracer_gazebo demo_tianracer_teb_nav.launch新开启一个终端,运行如下代码,启动Tianbot评分系统
rosrun tianracer_gazebo judge_system_node.py经过拖拽窗口后可以达到下图所示效果,则环境配置成功
6. 运行报错解决
找不到
python
其他类似
could not find..的与ros相关的报错
sudo apt install ros-noetic-ackermann-msgs ros-noetic-move-base \
ros-noetic-map-server ros-noetic-amcl \
ros-noetic-ros-control ros-noetic-ros-controllers \
ros-noetic-teb-local-planner安装录制环境
OBS Studio(Open Broadcaster Software Studio)是一款开源的跨平台录制和直播软件,具有以下特点和相比其他软件的优势:
- 免费且开源
- 跨平台支持
- 多种录制选项
- 直播功能
- 强大的配置选项
- 插件支持
- 社区支持
- 低系统资源占用
综合来说,OBS Studio 的开源性、跨平台支持、丰富的功能和配置选项,以及庞大的用户社区,使其成为许多内容创作者、游戏玩家和直播者的首选录制和直播工具。
1. 安装 OBS Studio
可以参考博客在 ubuntu 上安装 OBS Studio
2. 使用 OBS Studio 录制
使用方法
- 打开
OBS Studio,或新开一个终端输入obs即可运行 - 参数配置可参考文章录屏软件推荐:OBS Studio(免费软件)进行软件配置,如
输出位置,输出分辨率,热键等 - 录制步骤,可参考文章电脑上高清录屏,如何用 OBS 轻松搞定?