UR5 仿真实例
UR5仿真演示
Universal Robots(优傲机器人)公司是一家引领协作机器人全新细分市场的先驱企业,该公司成立于2005年,关注机器人的用户可操作性和灵活度,总部位于丹麦的欧登塞市。该公司主要的机器人产品有:UR3、UR5和UR10,分别针对不同的负载级别。UR5是该公司早在2009年推出的第一款协作机械臂,自重18kg,最大负载5kg,工作半径85cm。
ROS2GO中已经预置相关例程,本例程需要演示ROS中利用rviz规划和执行机械臂基本运动,对ROS机械臂开发学习和实践具有很强的借鉴意义。
- 打开终端(ctrl + alt + t),输入以下命令,启动UR5的gazebo仿真环境
roslaunch ur_gazebo ur5.launch- 再打开标签(ctrl + shift + n),输入以下命令,启动UR5运动规划插件
roslaunch ur5_moveit_config ur5_moveit_planning_execution.launch sim:=true- 再打开标签(ctrl + shift + n),输入以下命令,启动rviz可视化操作界面
roslaunch ur5_moveit_config moveit_rviz.launch config:=true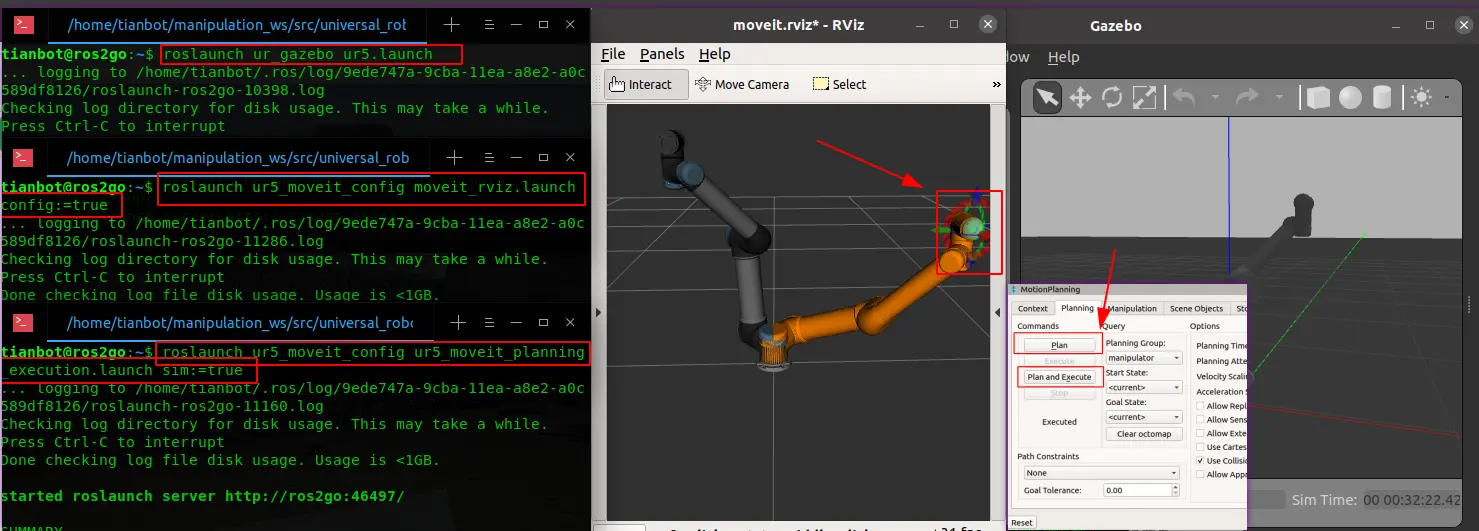
拖动机械臂末端的操作器,可以拖拽移动和转动,拖动到规划的指定位置。
点击MotionPlanning插件上Planning栏中的Plan按钮,可以看到规划的路径。
点击Plan and Exectue是规划和执行一起,致使机械臂运动到规划的制定位置。