Turtlebot 仿真实例
Turtlebot gazebot仿真演示
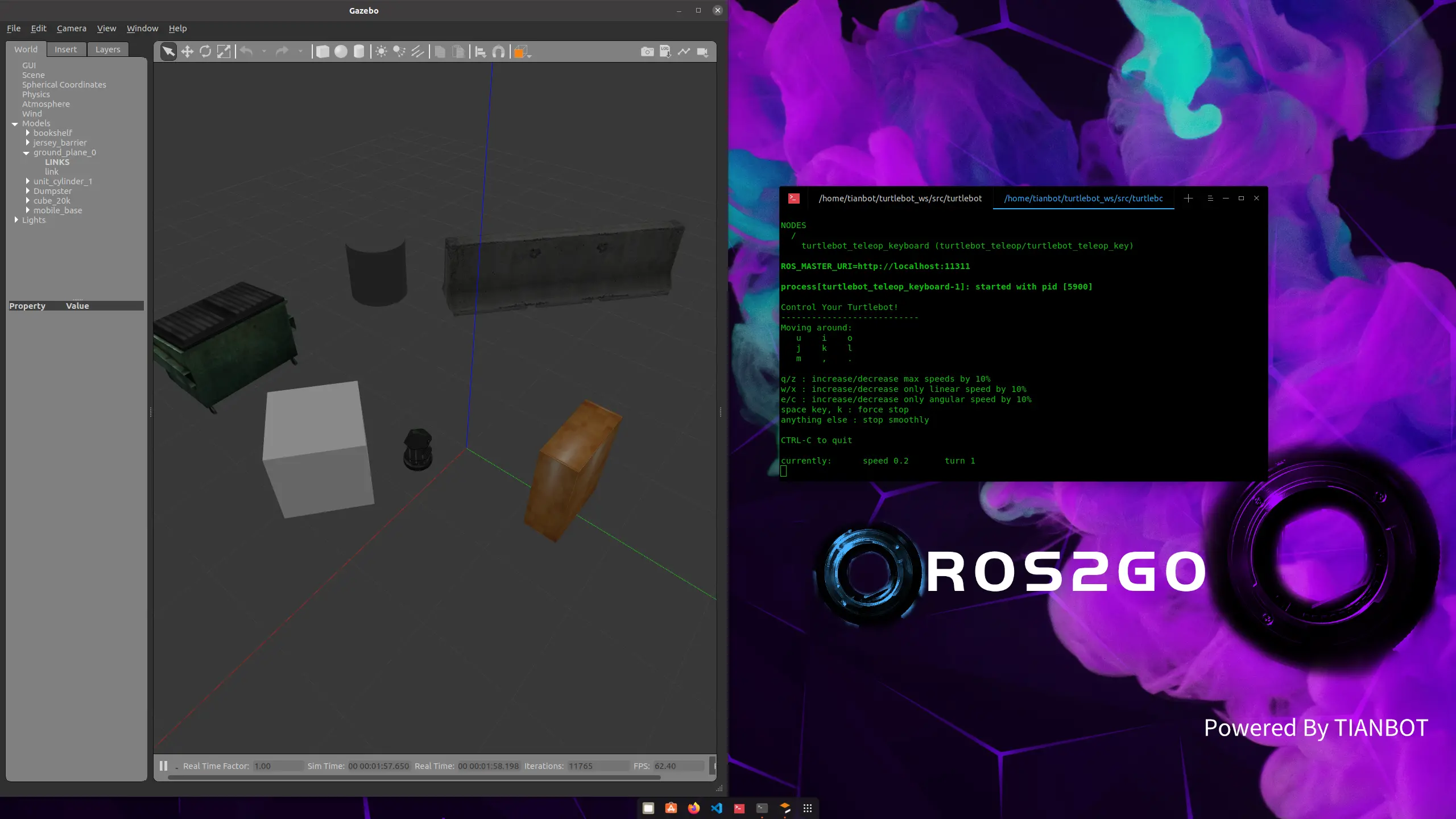
- 打开终端(ctrl + alt + t),输入以下命令
roslaunch turtlebot_gazebo turtlebot_world.launch- 再打开标签(ctrl + shift + n),输入以下命令
roslaunch turtlebot_teleop keyboard_teleop.launch显示效果如下:
Turtlebot gazebo建图演示
- 打开终端(ctrl + alt + t),输入以下命令,启动gazebo仿真环境
roslaunch turtlebot_gazebo turtlebot_world.launch- 再打开标签(ctrl + shift + n),输入以下命令,启动turtlebot机器人gmapping建图程序
roslaunch turtlebot_gazebo gmapping_demo.launch显示效果如下:

- 再打开标签(ctrl + shift + n),输入以下命令,启动rviz可视化界面
roslaunch turtlebot_rviz_launchers view_navigation.launch- 再打开标签(ctrl + shift + n),输入以下命令,启动键盘控制节点,进行仿真环境建图测试
roslaunch turtlebot_teleop keyboard_teleop.launch显示效果如下:

- 再打开标签(ctrl + shift + n),输入以下命令,保存地图
rosrun map_server map_saver -f mymap经过以上步骤,我们已经完成了建图的工作,我们会在home的用户目录下得到我们的mymap地图,mymap是最后保存的地图名称,在它之前也可以添加绝对路径,例如/home/tianbot/mymap但是这里没有添加,便会默认保存在home下的用户目录下。
Turtlebot gazebo导航演示
我们将使用上一步我们已经建立的地图进行虚拟环境导航,
- 打开终端(ctrl + alt + t),输入以下命令,启动gazebo仿真环境
roslaunch turtlebot_gazebo turtlebot_world.launch- 再打开标签(ctrl + shift + n),输入以下命令,启动turtlebot机器人定位导航节点
roslaunch turtlebot_gazebo amcl_demo.launch
或者
roslaunch turtlebot_gazebo amcl_demo.launch map_file:=/home/tianbot/mymap.yaml[info] map_file参数是指定加载地图的路径,如未指定参数,系统会加载默认地图。
- 再打开标签(ctrl + shift + n),输入以下命令,打开rviz
roslaunch turtlebot_rviz_launchers view_navigation.launch在rviz使用2D Nav Goal上点击目标点,机器人将根据给定目标点进行路径规划和导航,最终到达目标点。 
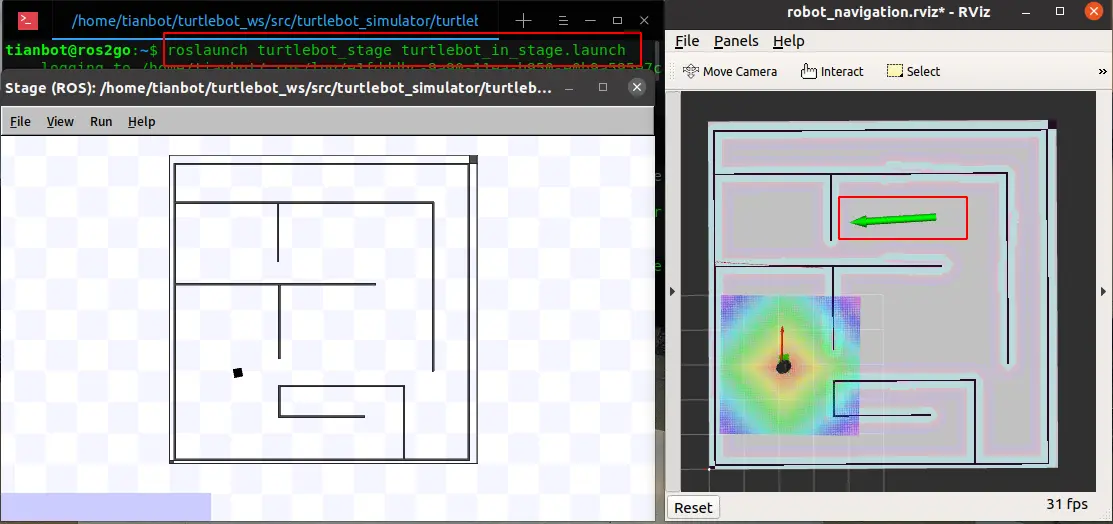
Turtlebot Stage仿真演示
除了Gazebo外,Stage也是ROS中一种比较流行的仿真环境,它主要为开发者提供一种2维仿真环境,关于Stage仿真环境的应用,这里不作介绍,如果需要可以参考网站自己学习。
- 打开终端(ctrl + alt + t),输入以下命令,启动turtlebot Stage 定位导航仿真
roslaunch turtlebot_stage turtlebot_in_stage.launch显示效果如下: