Intel Realsense 相机
RealSense 相机是由英特尔公司开发的深度感知相机,它能够捕捉三维空间信息,并生成深度图、点云图等数据。与传统的 RGB 相机相比,RealSense 相机具有以下优势:
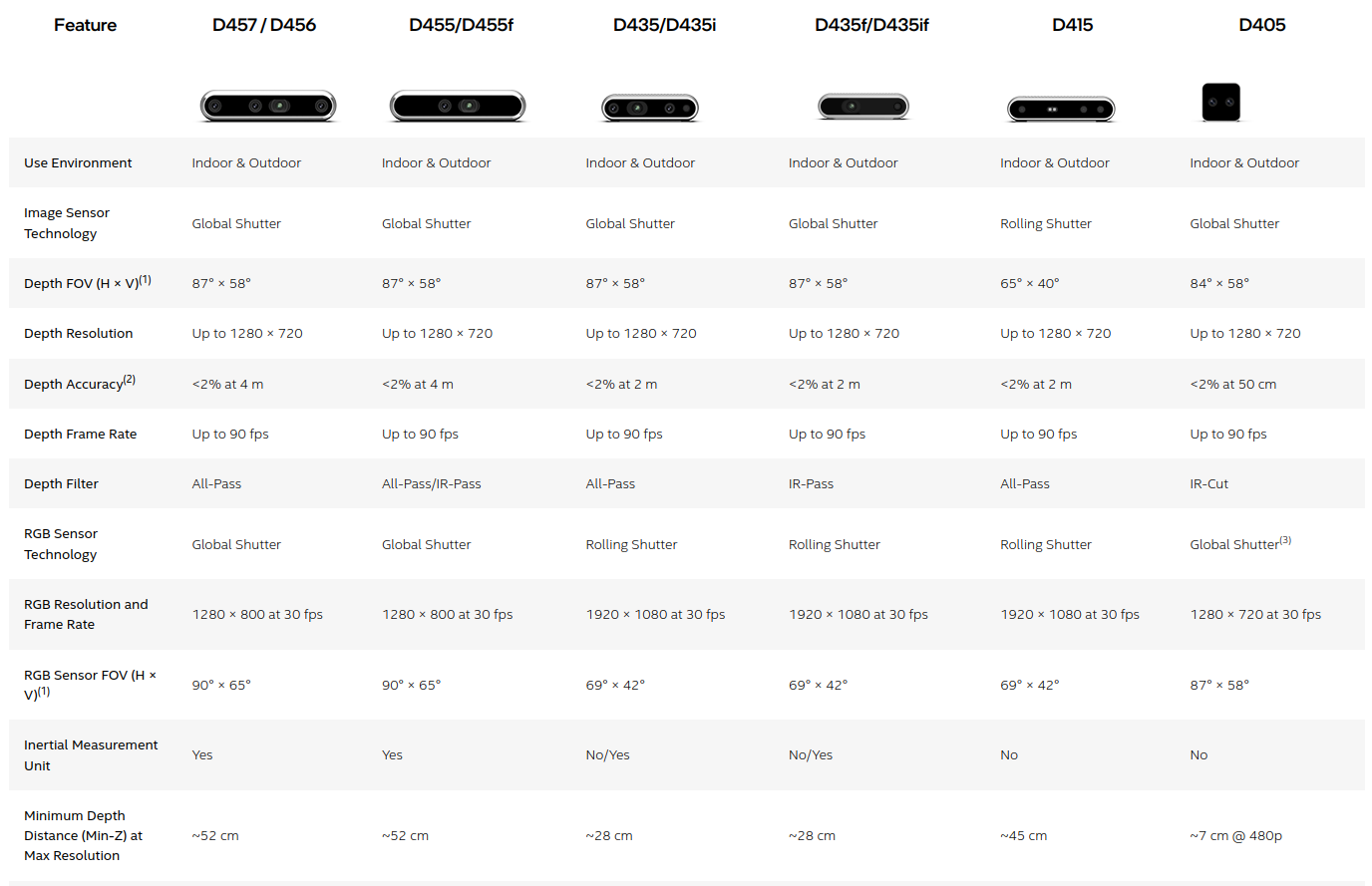
- 能够感知深度信息:RealSense 相机可以捕捉物体与相机的距离信息,从而生成深度图和点云图,实现三维空间感知。
- 具有较高的精度:RealSense 相机可以提供亚毫米级的深度精度,能够精确测量物体的距离和尺寸。
- 具有较强的鲁棒性:RealSense 相机能够在不同光照条件下工作,并且能够抵抗环境噪声的影响。
在 ROS2GO 中如何驱动
1、运行启动文件
sh
roslaunch realsense2_camera rs_camera.launchsh
ros2 launch realsense2_camera rs_launch.py2、查看话题
sh
rostopic listsh
ros2 topic list启动后查看到有如下话题,则可以利用 RViz 或者 rqt_image_view 等工具订阅这些 Topic,就可以显示相应的数据。
shell
/camera/color/image_raw (RGB image)
/camera/depth/image_rect_raw (depth image)
/camera/infra1/image_rect_raw (left infrared image)
/camera/infra2/image_rect_raw (right infrared image)
/camera/imu (imu, only for D435i and above)
.......2、使用 RVIZ 查看数据
sh
rvizsh
rviz23、或者使用 rqt_image_view 查看数据
sh
rqtsh
rqt