软件环境配置
无路由车型
大多数车型均为无路由器车型,需要外接显示器和键盘鼠标进行WiFi配置。
带路由器车型
1. 连接路由器
对于配置了网口激光雷达的车型,均配置车载路由器。机器人上电即开启路由器,默认网络名称为机器人名称+Mac地址后3位组成,同时有2.4G和5G频段入口,网络默认密码为www.tianbot.com,网络名称类似如下:
- TIANBOT-69f
- TIANBOT-69f-5G
- TIANROVER-ea0
- TIANROVER-ea0-5G
当然也可以使用网线通过路由器LAN口连接路由器进行设置。
2. 配置路由器
出厂时路由器默认网关设置为192.168.1.1,可以通过浏览器输入http://192.168.1.1访问路由器配置界面,管理员密码同网络默认密码一致。 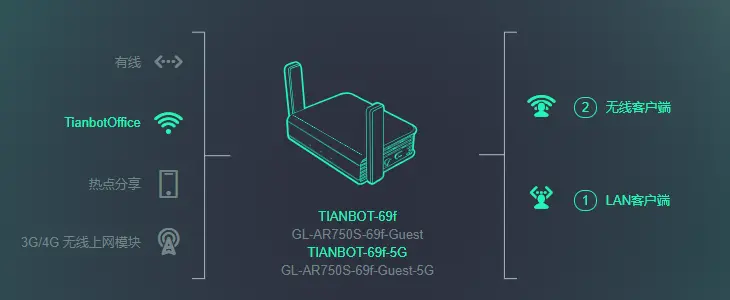 网络拓扑如上图所示,可以配置路由器通过WAN、无线、手机USB热点或者USB无线上网模块均可连接上级网络,这里我们选择用2.4G频段连接上级网络TianbotOffice,平常操作电脑用5G频段接入路由器。
网络拓扑如上图所示,可以配置路由器通过WAN、无线、手机USB热点或者USB无线上网模块均可连接上级网络,这里我们选择用2.4G频段连接上级网络TianbotOffice,平常操作电脑用5G频段接入路由器。 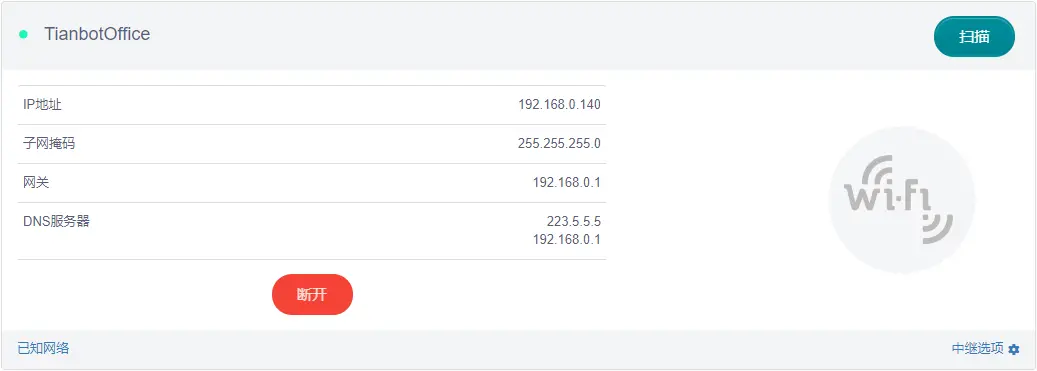
3. 接入机载上位机
因为配合激光雷达使用,机载上位机电脑的IP地址一般为192.168.1.102,可以通过SSH,用远程控制电脑接入机载上位机,用户名和密码需要参考上位机平台,
- NVIDIA平台一般用户名密码均为
nvidia - 妙算则为
dji - x86平台使用ros2go系统的话用户名为
tianbot密码为ros
若要使用ROS多机通信机制请参考ROS2GO使用手册中的ROS多机通信。