仿真与实体之间的联动
B站ROS零基础入门百日谈16
修改命名空间
仿真的机器人默认名字为tianbot_mini,如果我们使用实物机器人名字还为tianbot_mini的话,就需要按照之前章节那样,把实物机器人的名字改一下。
我们使用名字为tianlaoshi的机器人,代码就需要改动
把原文件的tianbot_mini改为tianlaoshi
把原文件的tianlaoshi改为tianbot_mini
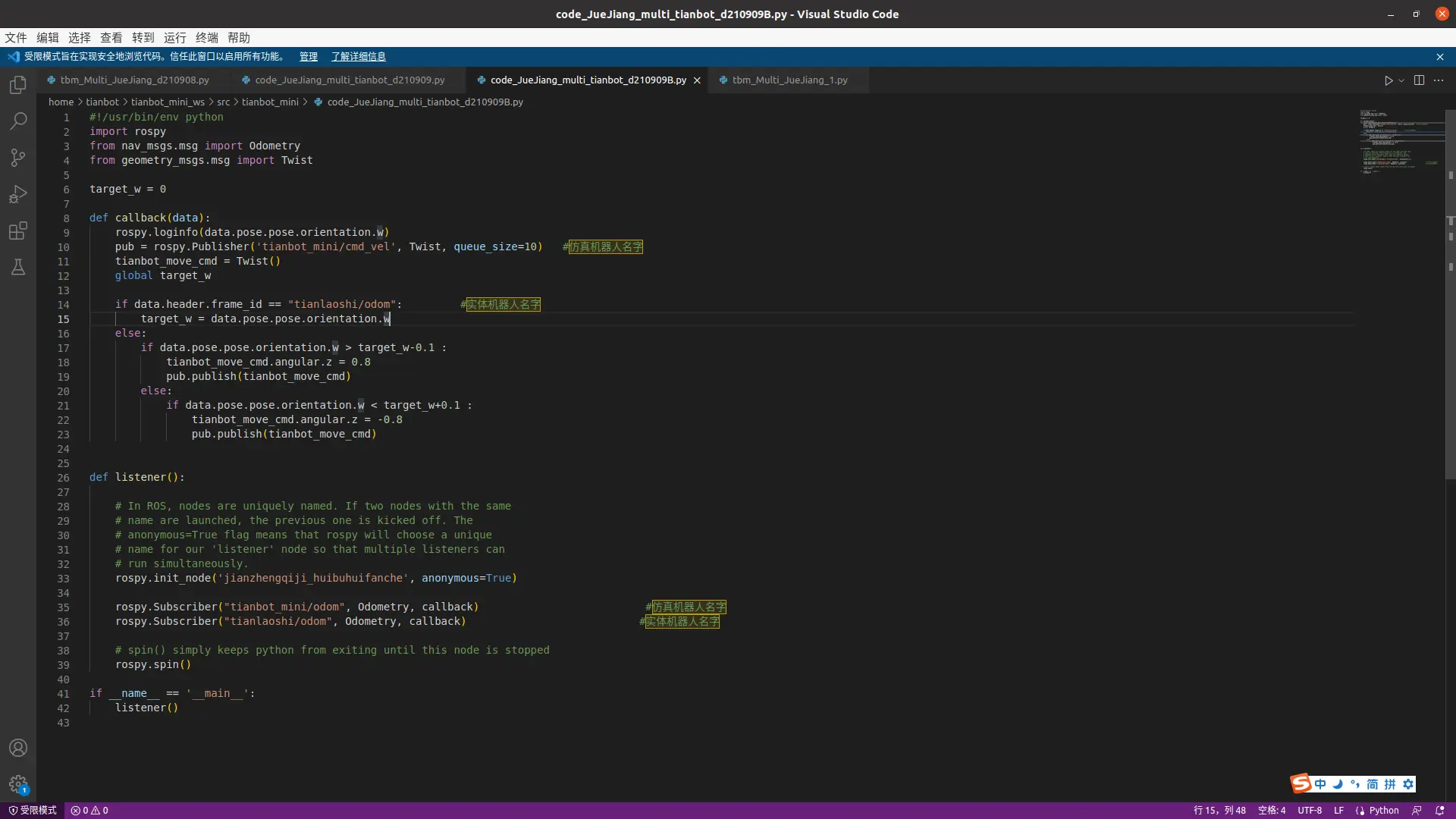
把改过的文件命名最后加个字母B作为区分
Gazebo仿真
打开gazebo仿真:
shell
roslaunch tianbot_mini simulation.launch
运行
shell
python code_JueJiang_multi_tianbot_d210909B.py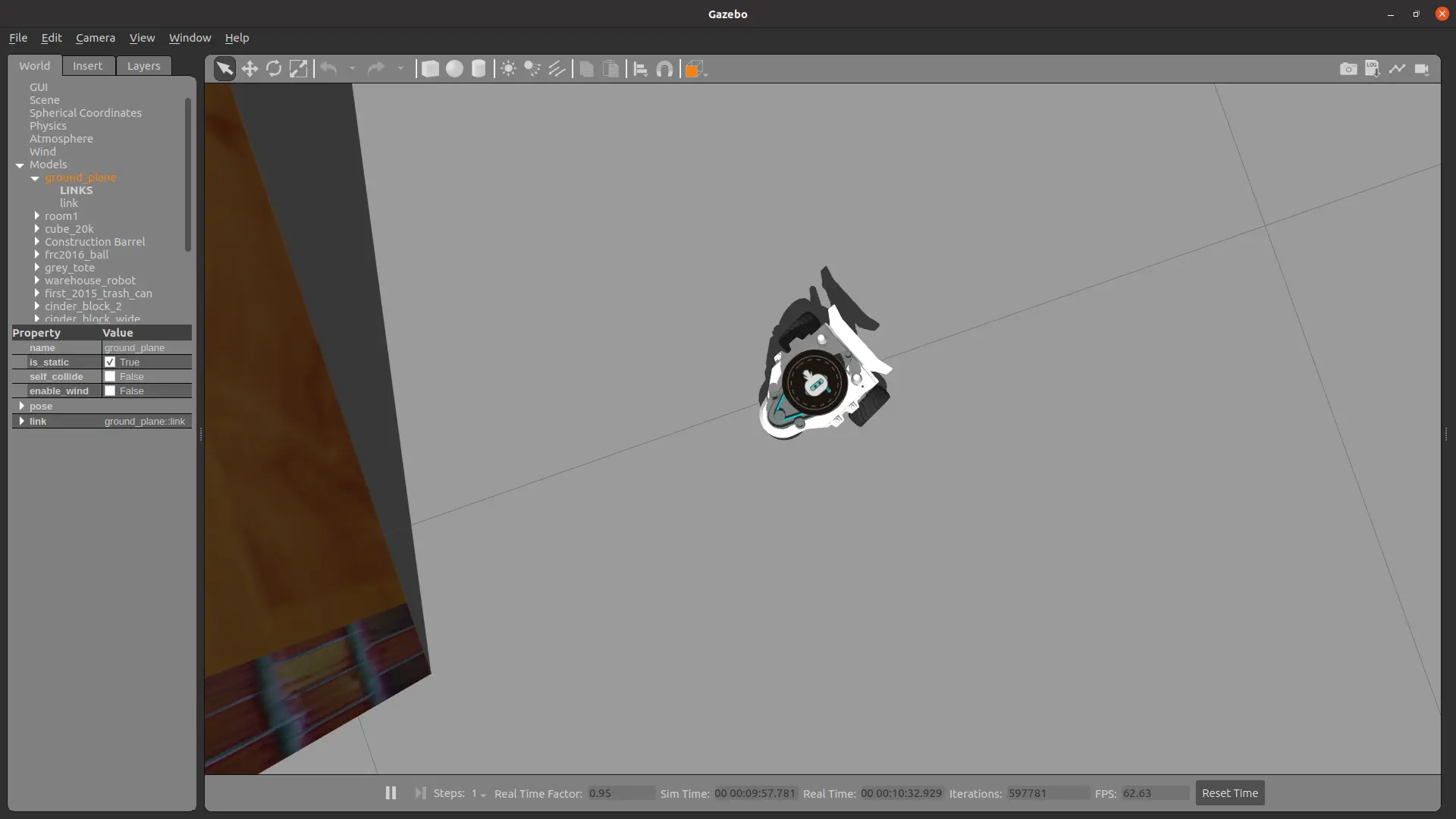
此时控制实体机器人移动,Gazebo中的仿真也会对应的移动,但仿真还会与之前的实物一样有摇摆的现象