Hector SLAM 建图
准备工作
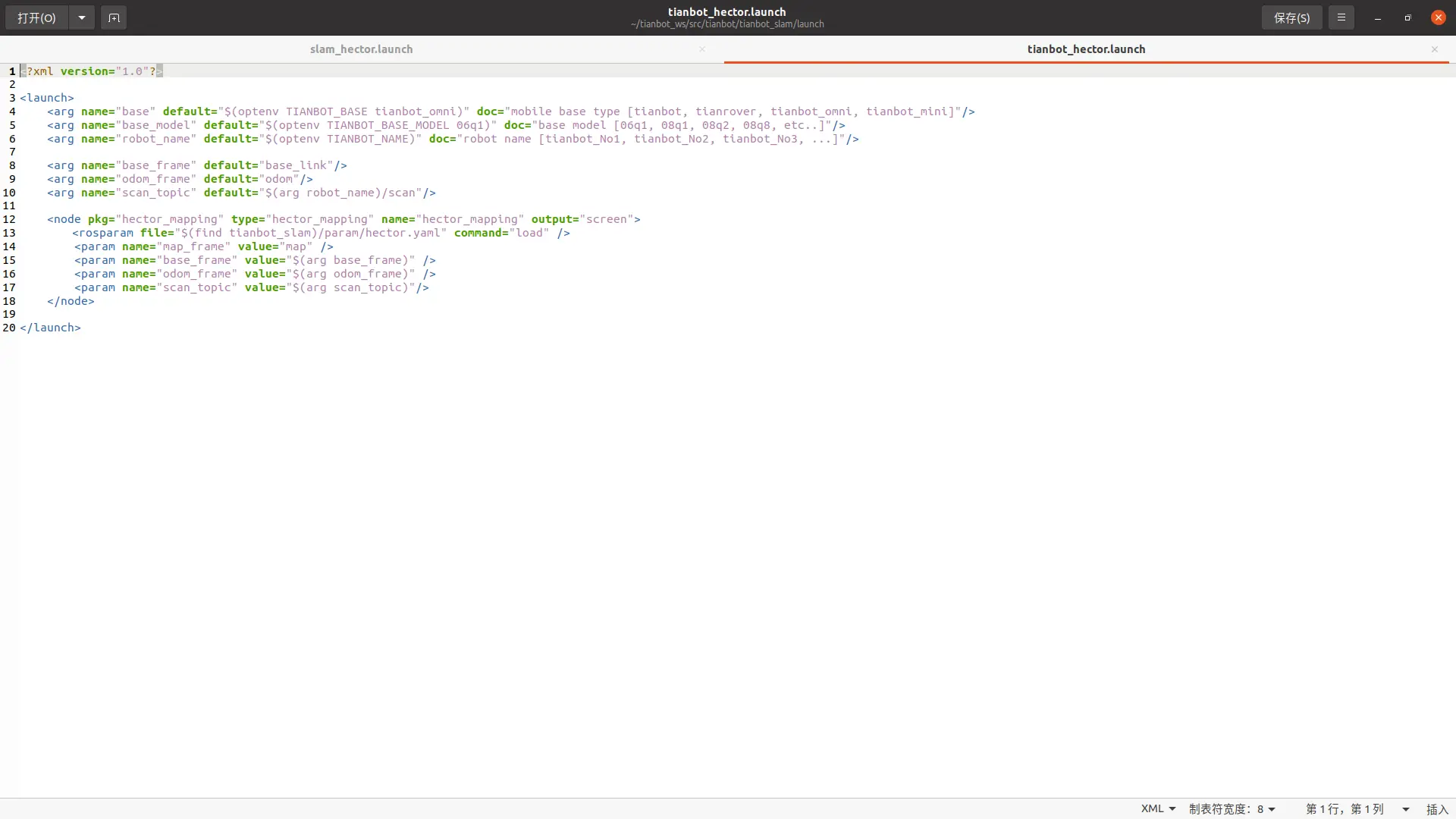
首先改代码,在 tianbot_hector.slam 移动过来,看包含文件,发现没有
shell
<rosparam file="$(find tianbot_slam)/param/hector.yaml" command="load" />所以这个 yaml 文件也要一起移动过来,文件在 param 里。
移动到:
对照 gmapping 改参数,把
改为:
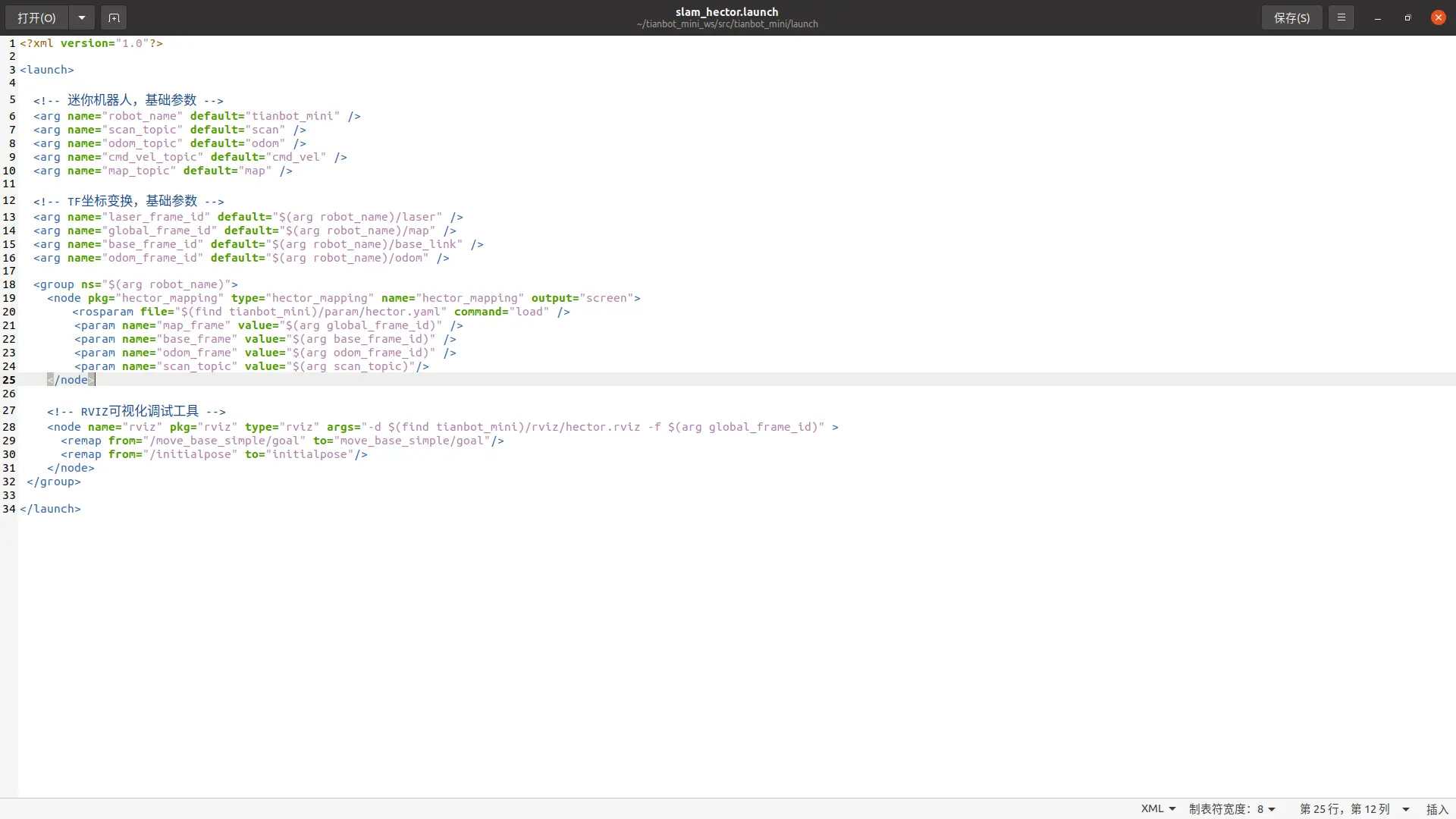
把参数移动过来,把话题名改成对应的即可。
启动驱动
shell
roslaunch tianbot_mini bringup.launchshell
roslaunch tianbot_mini lidar.launchshell
roslaunch tianbot_mini slam_hector.launchshell
roslaunch tianbot_mini teleop.launch保存配置文件
在 Rviz 直接保存查看构建的地图的配置文件,配置文件保存到了这里:
提示
Hector 对激光雷达精度很高,移动的时候尽可以慢一点。
保存地图
sh
roslaunch tianbot_mini map_save.launch提示
文件位置为tianbot_mini_ws/src/tianbot_mini/maps