Topic 订阅者编程
视频地址
概要:
完成订阅者的编程,达到机器人接收到话题信息
正文:
订阅者是如何编辑出来的
1.去ROS WIKI里复制接收者的代码
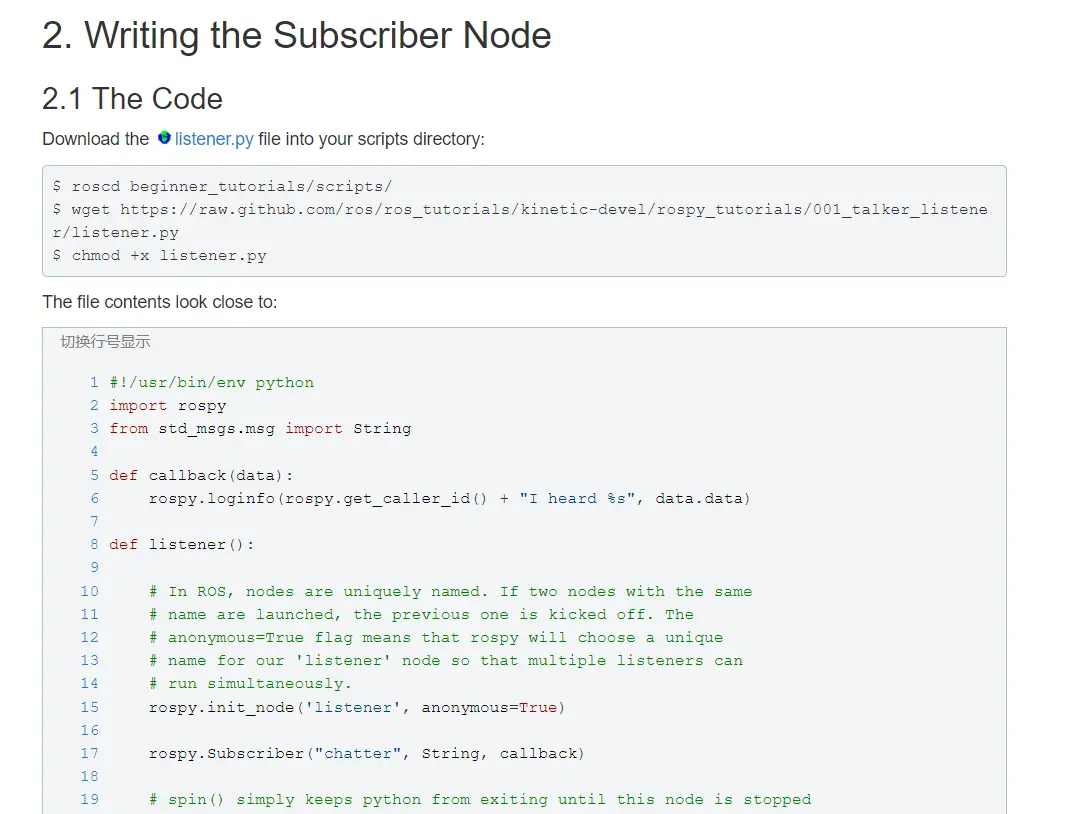
Python有严格的空格,请直接取掉行号直接复制到创建好的listener.py中:
启动小车,成功连接一车,运行
shell
roslaunch tianbot_mini bringup.launch在listener.py对应的文件夹内打开终端输入
shell
python listener.py可以看到什么都没有
再看一下上节课提到的/chatter话题

还是没有信息
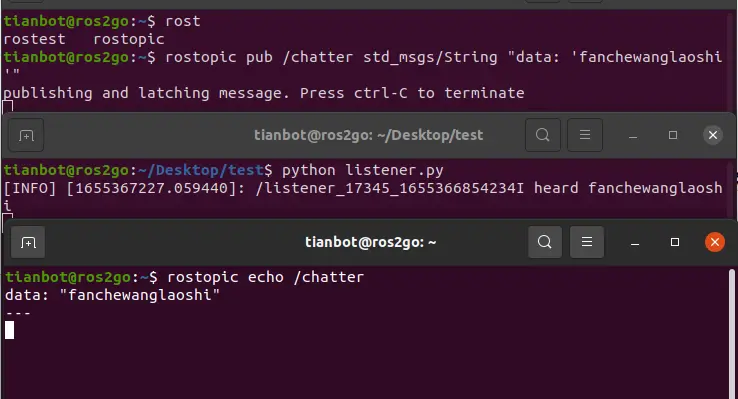
我们使用rostopic pub给他发布消息
可以看到都收到了信息
我们把listener.py里的话题名字/chatter改为/tianbot_mini/info

修改如下图

在观察info的话题类型
rostopic type/tianbot_mini/info
话题类型为std_msgs/String
我们再去上一节观察/chatter的话题类型
话题类型为std_msgs/String
两者相同,话题类型不用改动,现在三要素剩下 内容 我们要倾听也就是查看内容,所以内容不用再改,直接看是什么
2.观察
在对应文件夹下运行
shell
python listener.py可以看到listener在打印/tianbot_mini/info的信息
